
工业旋转变压器传感应用的电气设计要素
时间:2016-09-06 13:17来源:世纪电源网
摘要:旋转变压器是机械或模拟传感器,可用来确定电机的绝对位置和速度。该类传感器常用于工业,汽车和航空行业——特别是在电机或传感器可能会被污染的恶劣环境中。常见的污染物包括:油、污垢、食物颗粒,甚至是可能导致其他旋转感测技术无法实施的极端温度。特定的最终产品具有独特的设计挑战和要求,其中一些挑战和要求常见于大多数工业应用。其中两个挑战是:1)角位置和速度数据的绝对精度;2)最小化或消除电磁干扰(EMI)
作者:Ankur Verma,德州仪器应用工程师;Brian Rodriguez,德州仪器产品市场工程师
旋转变压器传感器可应用于恶劣的环境,帮助获得精确的角位置和速度数据
前言
旋转变压器是机械或模拟传感器,可用来确定电机的绝对位置和速度。该类传感器常用于工业,汽车和航空行业——特别是在电机或传感器可能会被污染的恶劣环境中。常见的污染物包括:油、污垢、食物颗粒,甚至是可能导致其他旋转感测技术无法实施的极端温度。特定的最终产品具有独特的设计挑战和要求,其中一些挑战和要求常见于大多数工业应用。其中两个挑战是:1)角位置和速度数据的绝对精度;2)最小化或消除电磁干扰(EMI)。
旋转变压器传感器的工业应用
一些绝对旋转传感技术(如光编码器)被多次选用于工业应用。然而, 当应付恶劣环境或出于低成本考虑时,旋转变压器是理想的选择。伺服电机常用于工业领域,与旋转变压器以及其他类型的位置传感器相连接。通常使用伺服电机和伺服驱动器与旋转变压器配合来实现角速度与位置测量的应用包括:
· 数控(CNC)和注塑机
· 升降机
· 机械手臂
· 电动交通工具(电动自行车、电动滑板车、电动轮椅等)
· 铁路运输
· 农业和建筑设备
· 公共汽车和重型卡车
· 高尔夫球车和低速电动车
主要的旋转变压器传感系统要求
精确和及时的旋转变压器角度输出
在找到利用旋转变压器来减轻电磁干扰对工业系统的影响的方法之前,重要的是要先理解为什么精确的位置控制是必不可少的。旋转变压器提供一个理论上与无限解析度一样的模拟输出。模拟到数字的转换技术,通过将输出分割成块或步骤的程度来限制解析度。对持续角进行有限分割将导致定量错误。例如,您可以使用一个12位分辨率的转换器来提供角输出。转换器轴旋转一圈被分为4096步(2^12对应一个12位分辨率)。由于一度等于60分,所以旋转一圈(360度)等于21600角分(60x360)。则每步的间隔为5.27角分(21600/4096)。系统不可能提供比5.27角分更好的信息。
决定正确角位置的两个关键点是系统精度和系统稳定时间。后者主要指的是角输出要花多久才能显示出精确位置。需要对系统的每个部件进行评价,以确定限制因素。系统中,典型的误差精度是旋转变压器误差和旋转变压器模拟数字转换(RDC’s)误差的总和。最常见的是,3-10角分就会出现一个旋转变压器误差。再加上5.27角分会出现旋转变压器模拟数字转换误差,则我们可以得出精确的误差出现范围是8.27-15.27角分。因此,选择正确的RDC很重要。以下因素在典型的旋转变压器应用中会对系统精度和稳定时间产生影响 [1]:
机械因素
· 传感器的结构(零位电压、变压比等)
· 传感器规格随温度的变化
· 线圈不平衡:正弦和余弦线圈输出电压可能会不平衡,从而导致误差
· 旋转变压器传感器未对准:旋转变压器也许安装错误,导致系统静态误差
· 旋转变压器传感器的极的数量:由于每增加一对极就会多检测360度,因此增加的极数会降低角误差
电气因素
· 旋转变压器模拟-数字转换结构
· 旋转变压器信号输入到角输出的时间延迟,反应快速的角变化稳定时间
· 模拟前端(AFE)部件的不平衡
· 系统具备处理环境因素的能力(例如,外部磁场或共模噪音)
稳定时间
当旋转变压器的电机位置或输出信号变化迅速时,稳定时间是RDC控制系统的快速性能指标[2]。图1显示的一个是有阶跃输入变化(黑线)的RDC反馈控制系统的稳定时间的例子。蓝色信号显示的是对电路的正常模式响应,红色信号显示的是加速模式过程中响应(角快速变化)。为了在快速变化的条件下追踪到旋转角,加速模式帮助控制回路很容易跟踪到一个快速的旋转角[4]。
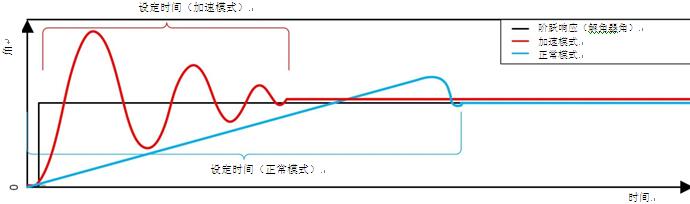
图 1:RDC阶跃响应稳定时间
EMC/EMI影响旋转变压器系统
电磁兼容性(EMC)指的是:电子系统要怎样在电磁环境中运行而不产生问题(免疫力)。同样地,系统发射脉冲一定不能干扰到范围中的任何产品。在工业设备应用中,变速驱动器和控制电路是主要干扰源。功率元件的快速切换,例如绝缘栅双极型晶体管(IGBT)和微控制器,是高频发射或干扰的主要来源。IGBT切换时间可长达100nS。
电气设备应该不受高频现象影响,例如:
1. 静电放电(ESD)
2. 快速瞬变(也称为EFT)
3. 辐射电磁场
4. 传导射频干扰
5. 浪涌脉冲
限制条件由工业标准决定,例如IEC61800-3标准规定了包含AC/DC电机和控制电路的变速驱动器的电磁兼容性要求。在这样的环境下,任何设计都应该遵守确定的基本电气设计原则,以减轻噪声影响[3]。
1. 电子PCB原理图和布局设计:
a. 分别进行电源和模拟接地
b. 使用模拟滤波器来消除感测器信号上的共模噪音
c. 针对高频干扰(如:铁氧体磁珠)的高频、低阻抗滤波器
d. 最小化回环面积,以便接地可以为信号返回路径提供尽可能低的阻抗
2. 机械设计:
a. 使用铠装的电缆和连接器(例如DB-9铠装连接器)
b. 布线:最小化驱动器和感测器部件之间的电缆长度
c. 使用铠装双绞电源和控制电缆来避免干扰
d. 使用双铠装来降低辐射干扰
变速驱动器的电磁干扰免疫力要求
TI工程师测试IEC61800-3标准来获取环境规范(表1)。该设计使用铠装连接器和铠装电缆(长度>30m)。标准的定义见表2。

表1:IEC61800-3规定的变速驱动器的EMC规范

表2:IEC61800-3通过性能标准
EMI结果来自哪里?
任何高dl/dt或dV/dt都可能作为电磁干扰(EMI)的重要潜在源头。电子信号的EDGE率可以产生谐波和互调失真。例如,一边10ns的EDGE率和另一边1ns的EDGE率导致10MHz的方波。这展示了增加的谐波含量如何伴随具有更快Edge Rate的方波。使用等式1作为一个计算特定Edge Rate下的谐波频率范围的一般公式:
 (1)
(1)
根据该公式,10nsEdge Rate对应的谐波频率大约为31.8MHz。图3显示:最后一个重要的谐波频率为30MHZ。同时,1ns的Edge Rate对应的谐波频率318MHZ(图2)。如果频率范围扩展到300MHZ以外,显示的谐波仍很明显,但却在相关频率上迅速变小。

图 2:10MHz方波频谱

图 3:31.8MHz方波频谱
这些方法可以帮助降低噪音对旋转变压器系统精度的整体影响:
1. 使用差分信号帮助减少电缆中的电气噪音
2. 铠装线缆噪音在影响传感器电路和产生误差之前传入地下
3. 在RDC结构中使用的模拟前端(AFE)可以过滤掉共模噪音
4. 争取获得具有尽可能低阻抗的接近完美的接地方式
5. 尽可能缩小扮演EMI天线角色的环路
屏蔽和过滤
所有导电的部件,如电缆、地、金属外壳等,可以传播辐射。电缆的转移阻抗必须在频率达到100MHz的范围内低于100 mΩ/m。最高的屏蔽效果可以使用金属导管或波纹铝屏蔽层实现。电缆路径越长,要求的转移阻抗越低。可以在信号电缆中使用共模电感器,以在一个特定功率上抑制共模干扰。一个理想的共模电感器不会一直差模信号。Faraday Cage(法拉第笼)技术是另一个常用的控制辐射干扰的方法。

图 4:抑制共模噪音的扼流实例
结论
工业电机位置传感应用中的独特高精度与噪音挑战,可以通过全面的设计考量和仔细的电子元件选择来解决。设计旋转变压器时,设计师应考虑系统稳定时间的规范、有关EMI/EMC的芯片性能以及这些因素如何影响整体的系统精度。
参考文献
1. Verma, Ankur; Chellamuthu, Anand.“用于电动车辆的旋转变压器转数字转换器设计考虑,”TI模拟应用期刊, 1Q 2016
2. Irfan Ahmed, “使用TMS320系列数字信号处理器(DSP)的PID和直进式控制器的实现 (SPRA083),”TI应用报告,1997
3. Martin Staebler, “为电机位置编码器设计一个符合电磁兼容性(EMC)的接口 – 第1部分,”TI电机驱动与控制博客,2015年8月31日
4. R Mancini, “TI运放基础与设计指南,”ISBN:978-0-7506-7701-1.Elsevier 2003
补充阅读
· Verma, Ankur; Panacek, J..“PGA411-Q1 PCB设计指南,”TI应用报告 (SLAA697), 2016年3月
· Verma, Ankur; Xu, F. “PGA411-Q1故障排除指南,”TI应用报告(SLAA687), 2016年2月
· A. Verma, F. Xu, J.Panacek.“PGA411-Q1任意主机系统的逐步初始化,(SLAA688)” Mar’16, TI应用报告,2016年3月
· 下载PGA411-Q1数据表
旋转变压器传感器可应用于恶劣的环境,帮助获得精确的角位置和速度数据
前言
旋转变压器是机械或模拟传感器,可用来确定电机的绝对位置和速度。该类传感器常用于工业,汽车和航空行业——特别是在电机或传感器可能会被污染的恶劣环境中。常见的污染物包括:油、污垢、食物颗粒,甚至是可能导致其他旋转感测技术无法实施的极端温度。特定的最终产品具有独特的设计挑战和要求,其中一些挑战和要求常见于大多数工业应用。其中两个挑战是:1)角位置和速度数据的绝对精度;2)最小化或消除电磁干扰(EMI)。
旋转变压器传感器的工业应用
一些绝对旋转传感技术(如光编码器)被多次选用于工业应用。然而, 当应付恶劣环境或出于低成本考虑时,旋转变压器是理想的选择。伺服电机常用于工业领域,与旋转变压器以及其他类型的位置传感器相连接。通常使用伺服电机和伺服驱动器与旋转变压器配合来实现角速度与位置测量的应用包括:
· 数控(CNC)和注塑机
· 升降机
· 机械手臂
· 电动交通工具(电动自行车、电动滑板车、电动轮椅等)
· 铁路运输
· 农业和建筑设备
· 公共汽车和重型卡车
· 高尔夫球车和低速电动车
主要的旋转变压器传感系统要求
精确和及时的旋转变压器角度输出
在找到利用旋转变压器来减轻电磁干扰对工业系统的影响的方法之前,重要的是要先理解为什么精确的位置控制是必不可少的。旋转变压器提供一个理论上与无限解析度一样的模拟输出。模拟到数字的转换技术,通过将输出分割成块或步骤的程度来限制解析度。对持续角进行有限分割将导致定量错误。例如,您可以使用一个12位分辨率的转换器来提供角输出。转换器轴旋转一圈被分为4096步(2^12对应一个12位分辨率)。由于一度等于60分,所以旋转一圈(360度)等于21600角分(60x360)。则每步的间隔为5.27角分(21600/4096)。系统不可能提供比5.27角分更好的信息。
决定正确角位置的两个关键点是系统精度和系统稳定时间。后者主要指的是角输出要花多久才能显示出精确位置。需要对系统的每个部件进行评价,以确定限制因素。系统中,典型的误差精度是旋转变压器误差和旋转变压器模拟数字转换(RDC’s)误差的总和。最常见的是,3-10角分就会出现一个旋转变压器误差。再加上5.27角分会出现旋转变压器模拟数字转换误差,则我们可以得出精确的误差出现范围是8.27-15.27角分。因此,选择正确的RDC很重要。以下因素在典型的旋转变压器应用中会对系统精度和稳定时间产生影响 [1]:
机械因素
· 传感器的结构(零位电压、变压比等)
· 传感器规格随温度的变化
· 线圈不平衡:正弦和余弦线圈输出电压可能会不平衡,从而导致误差
· 旋转变压器传感器未对准:旋转变压器也许安装错误,导致系统静态误差
· 旋转变压器传感器的极的数量:由于每增加一对极就会多检测360度,因此增加的极数会降低角误差
电气因素
· 旋转变压器模拟-数字转换结构
· 旋转变压器信号输入到角输出的时间延迟,反应快速的角变化稳定时间
· 模拟前端(AFE)部件的不平衡
· 系统具备处理环境因素的能力(例如,外部磁场或共模噪音)
稳定时间
当旋转变压器的电机位置或输出信号变化迅速时,稳定时间是RDC控制系统的快速性能指标[2]。图1显示的一个是有阶跃输入变化(黑线)的RDC反馈控制系统的稳定时间的例子。蓝色信号显示的是对电路的正常模式响应,红色信号显示的是加速模式过程中响应(角快速变化)。为了在快速变化的条件下追踪到旋转角,加速模式帮助控制回路很容易跟踪到一个快速的旋转角[4]。
图 1:RDC阶跃响应稳定时间
EMC/EMI影响旋转变压器系统
电磁兼容性(EMC)指的是:电子系统要怎样在电磁环境中运行而不产生问题(免疫力)。同样地,系统发射脉冲一定不能干扰到范围中的任何产品。在工业设备应用中,变速驱动器和控制电路是主要干扰源。功率元件的快速切换,例如绝缘栅双极型晶体管(IGBT)和微控制器,是高频发射或干扰的主要来源。IGBT切换时间可长达100nS。
电气设备应该不受高频现象影响,例如:
1. 静电放电(ESD)
2. 快速瞬变(也称为EFT)
3. 辐射电磁场
4. 传导射频干扰
5. 浪涌脉冲
限制条件由工业标准决定,例如IEC61800-3标准规定了包含AC/DC电机和控制电路的变速驱动器的电磁兼容性要求。在这样的环境下,任何设计都应该遵守确定的基本电气设计原则,以减轻噪声影响[3]。
1. 电子PCB原理图和布局设计:
a. 分别进行电源和模拟接地
b. 使用模拟滤波器来消除感测器信号上的共模噪音
c. 针对高频干扰(如:铁氧体磁珠)的高频、低阻抗滤波器
d. 最小化回环面积,以便接地可以为信号返回路径提供尽可能低的阻抗
2. 机械设计:
a. 使用铠装的电缆和连接器(例如DB-9铠装连接器)
b. 布线:最小化驱动器和感测器部件之间的电缆长度
c. 使用铠装双绞电源和控制电缆来避免干扰
d. 使用双铠装来降低辐射干扰
变速驱动器的电磁干扰免疫力要求
TI工程师测试IEC61800-3标准来获取环境规范(表1)。该设计使用铠装连接器和铠装电缆(长度>30m)。标准的定义见表2。
表1:IEC61800-3规定的变速驱动器的EMC规范
表2:IEC61800-3通过性能标准
EMI结果来自哪里?
任何高dl/dt或dV/dt都可能作为电磁干扰(EMI)的重要潜在源头。电子信号的EDGE率可以产生谐波和互调失真。例如,一边10ns的EDGE率和另一边1ns的EDGE率导致10MHz的方波。这展示了增加的谐波含量如何伴随具有更快Edge Rate的方波。使用等式1作为一个计算特定Edge Rate下的谐波频率范围的一般公式:
(1) 根据该公式,10nsEdge Rate对应的谐波频率大约为31.8MHz。图3显示:最后一个重要的谐波频率为30MHZ。同时,1ns的Edge Rate对应的谐波频率318MHZ(图2)。如果频率范围扩展到300MHZ以外,显示的谐波仍很明显,但却在相关频率上迅速变小。
图 2:10MHz方波频谱
图 3:31.8MHz方波频谱
这些方法可以帮助降低噪音对旋转变压器系统精度的整体影响:
1. 使用差分信号帮助减少电缆中的电气噪音
2. 铠装线缆噪音在影响传感器电路和产生误差之前传入地下
3. 在RDC结构中使用的模拟前端(AFE)可以过滤掉共模噪音
4. 争取获得具有尽可能低阻抗的接近完美的接地方式
5. 尽可能缩小扮演EMI天线角色的环路
屏蔽和过滤
所有导电的部件,如电缆、地、金属外壳等,可以传播辐射。电缆的转移阻抗必须在频率达到100MHz的范围内低于100 mΩ/m。最高的屏蔽效果可以使用金属导管或波纹铝屏蔽层实现。电缆路径越长,要求的转移阻抗越低。可以在信号电缆中使用共模电感器,以在一个特定功率上抑制共模干扰。一个理想的共模电感器不会一直差模信号。Faraday Cage(法拉第笼)技术是另一个常用的控制辐射干扰的方法。
图 4:抑制共模噪音的扼流实例
结论
工业电机位置传感应用中的独特高精度与噪音挑战,可以通过全面的设计考量和仔细的电子元件选择来解决。设计旋转变压器时,设计师应考虑系统稳定时间的规范、有关EMI/EMC的芯片性能以及这些因素如何影响整体的系统精度。
参考文献
1. Verma, Ankur; Chellamuthu, Anand.“用于电动车辆的旋转变压器转数字转换器设计考虑,”TI模拟应用期刊, 1Q 2016
2. Irfan Ahmed, “使用TMS320系列数字信号处理器(DSP)的PID和直进式控制器的实现 (SPRA083),”TI应用报告,1997
3. Martin Staebler, “为电机位置编码器设计一个符合电磁兼容性(EMC)的接口 – 第1部分,”TI电机驱动与控制博客,2015年8月31日
4. R Mancini, “TI运放基础与设计指南,”ISBN:978-0-7506-7701-1.Elsevier 2003
补充阅读
· Verma, Ankur; Panacek, J..“PGA411-Q1 PCB设计指南,”TI应用报告 (SLAA697), 2016年3月
· Verma, Ankur; Xu, F. “PGA411-Q1故障排除指南,”TI应用报告(SLAA687), 2016年2月
· A. Verma, F. Xu, J.Panacek.“PGA411-Q1任意主机系统的逐步初始化,(SLAA688)” Mar’16, TI应用报告,2016年3月
· 下载PGA411-Q1数据表
免责声明:本文若是转载新闻稿,转载此文目的是在于传递更多的信息,版权归原作者所有。文章所用文字、图片、视频等素材如涉及作品版权问题,请联系本网编辑予以删除。
我要投稿
近期活动
- 安森美汽车&能源基础设施白皮书下载活动时间:2024年04月01日 - 2024年10月31日[立即参与]
- 2023年安森美(onsemi)在线答题活动时间:2023年09月01日 - 2023年09月30日[查看回顾]
- 2023年安森美(onsemi)在线答题活动时间:2023年08月01日 - 2023年08月31日[查看回顾]
- 【在线答题活动】PI 智能家居热门产品,带您领略科技智慧家庭时间:2023年06月15日 - 2023年07月15日[查看回顾]
- 2023年安森美(onsemi)在线答题活动时间:2023年06月01日 - 2023年06月30日[查看回顾]
分类排行榜
- 汽车电子电源行业可靠性要求,你了解多少?
- 内置可编程模拟功能的新型 Renesas Synergy™ 低功耗 S1JA 微控制器
- Vishay 推出高集成度且符合 IrDA® 标准的红外收发器模块
- ROHM 发布全新车载升降压电源芯片组
- 艾迈斯半导体推出行业超薄的接近/颜色传感器模块,助力实现无边框智能手机设计
- 艾迈斯半导体与 Qualcomm Technologies 集中工程优势开发适用于手机 3D 应用的主动式立体视觉解决方案
- 维谛技术(Vertiv)同时亮相南北两大高端峰会,精彩亮点不容错过
- 缤特力推出全新商务系列耳机 助力解决开放式办公的噪音难题
- CISSOID 和泰科天润(GPT)达成战略合作协议,携手推动碳化硅功率器件的广泛应用
- 瑞萨电子推出 R-Car E3 SoC,为汽车大显示屏仪表盘带来高端3D 图形处理性能
编辑推荐
小型化和稳定性如何兼得?ROHM 推出超小型高输出线性 LED 驱动器 IC,为插座型 LED 驱动 IC 装上一颗强有力的 “心脏”
众所周知,LED的驱动IC担负着在输入电压不稳定的情况下,为LED提供恒定的电流,并控制恒定(可调)亮度的作用。无论是室内照明,还是车载应用,都肩负着极为重要的使命。
- 关于反激电源效率的一个疑问
时间:2022-07-12 浏览量:10242
- 面对热拔插阐述的瞬间大电流怎么解决
时间:2022-07-11 浏览量:9001
- PFC电路对N线进行电压采样的目的是什么
时间:2022-07-08 浏览量:9648
- RCD中的C对反激稳定性有何影响
时间:2022-07-07 浏览量:7245
- 36W单反激 传导7~10M 热机5分钟后超标 不知道哪里出了问题
时间:2022-07-07 浏览量:6015
- PFC电感计算
时间:2022-07-06 浏览量:4222
- 多相同步BUCK
时间:2010-10-03 浏览量:37889
- 大家来讨论 系列之二:开机浪涌电流究竟多大?
时间:2016-01-12 浏览量:43186
- 目前世界超NB的65W适配器
时间:2016-09-28 浏览量:60046
- 精讲双管正激电源
时间:2016-11-25 浏览量:128201
- 利用ANSYS Maxwell深入探究软磁体之----电感变压器
时间:2016-09-20 浏览量:107592
- 【文原创】认真的写了一篇基于SG3525的推挽,附有详细..
时间:2015-08-27 浏览量:100349
